Maze Solving Robot
Aim
This project was for the UQ course METR4202 - Robotics and Automation. The aims of this course are to develop students’ skills in classical computer vision techniques, kinematics techniques, and combining these concepts together into a fucntioning robot.
The purpose of the robot was to navigate a “puck” (Australian 20 cent coin) through a varying maze constructed of hard foam blocks to a goal circle - a valid path is shown in the image below. Extra points could be obtained by rotating a black marking on the coin to the same orientation as the goal destination. Extra points were also awarded for precise positioning of the puck on the goal circle.

Hardware
The high-level design constraints were:
- 30x40cm (A3 sized) work area
- 4 actuators
- x-y planar manipulation ability
- coin rotation control
- price
- construction simplicity
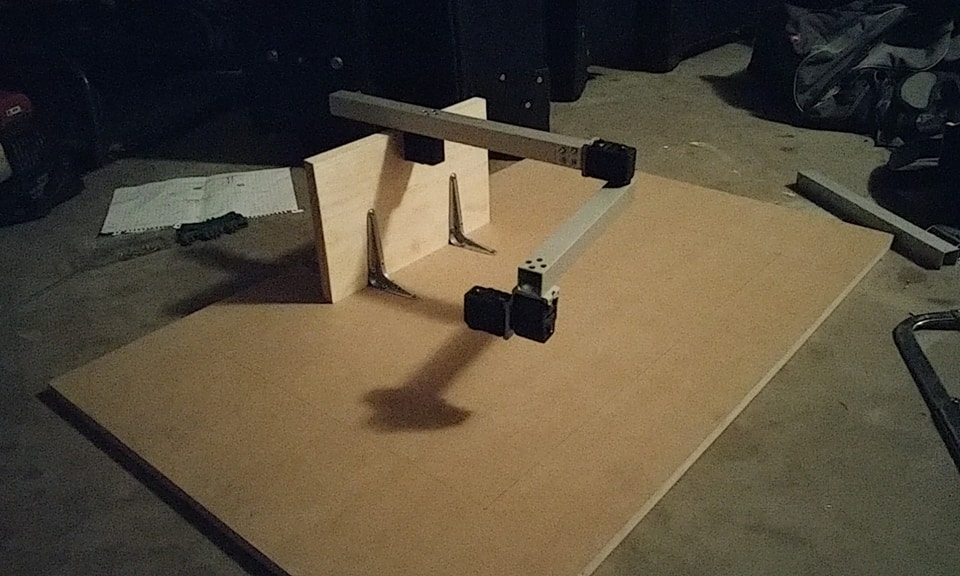
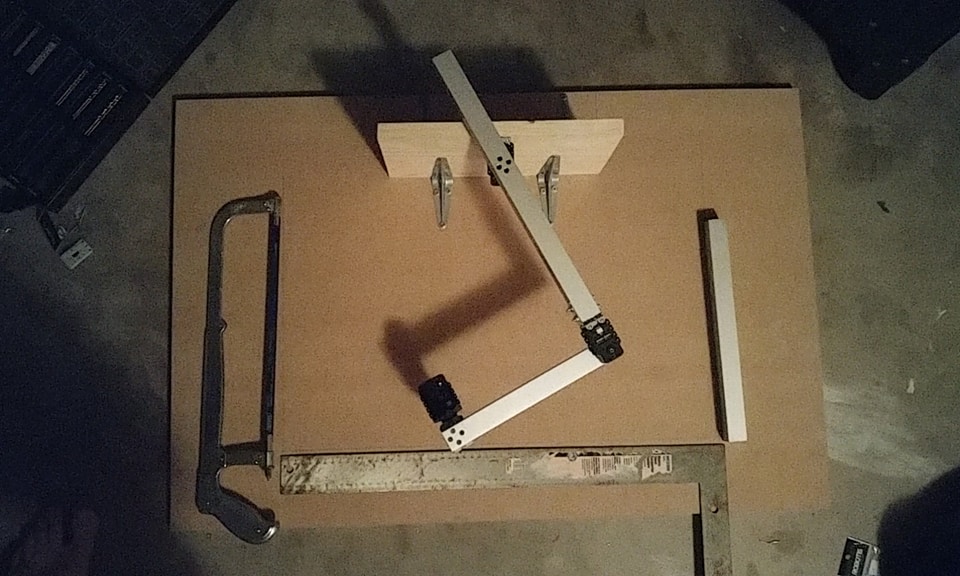
Based on these design constraints the following arm was constructed of aluminium square cross-section, MDF and pine wood. The link lengths were the minimum length needed to practically cover the work area. Two revolute links perpendicular to the plane of operation provided the x-y movement, a parallel revolute link allowed the end effector to be raised and lowered, and a final actuator aligned axially on the end effector allowed for coin rotation.
Software
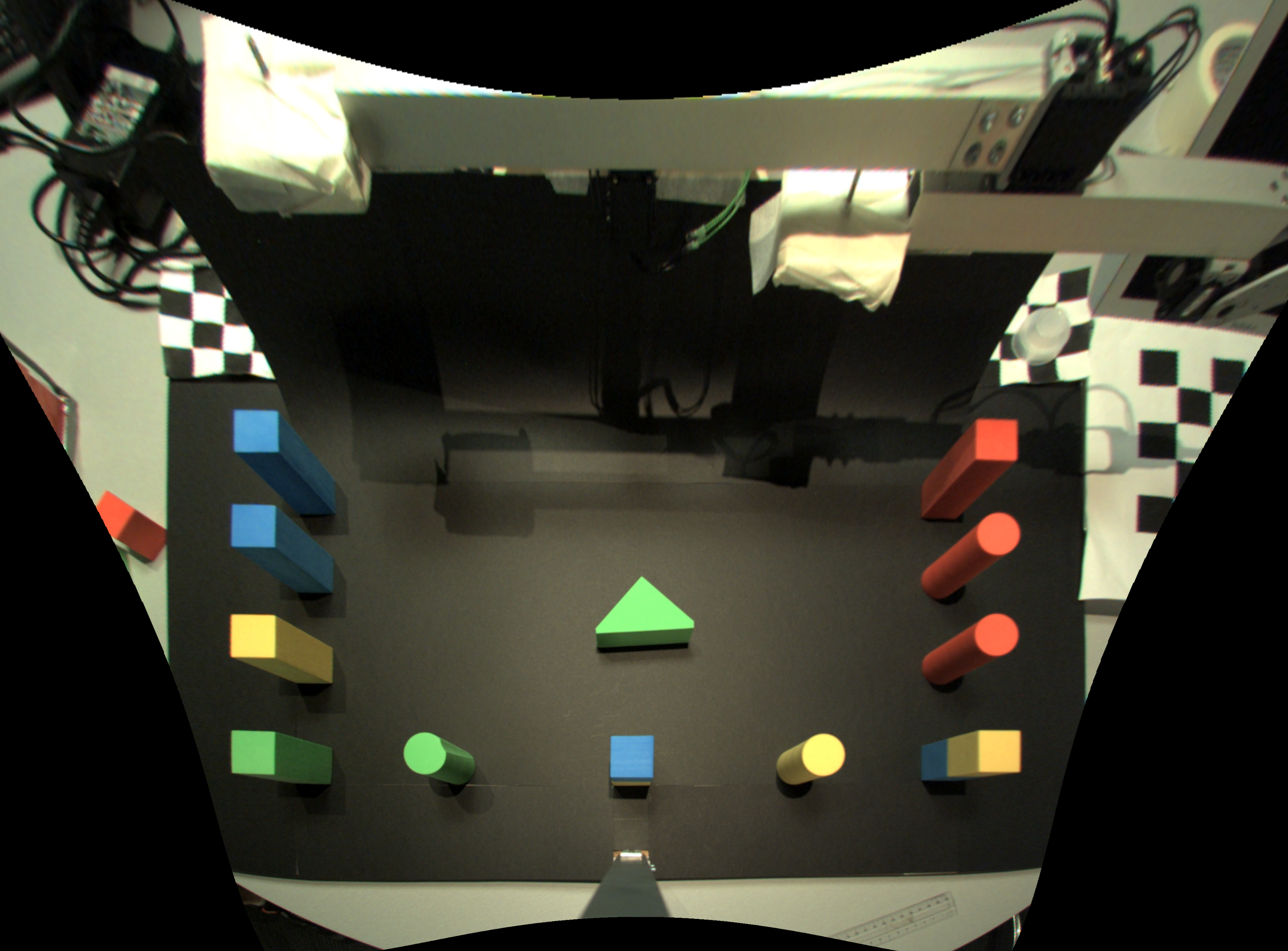
A top-down camera mount could not be used (due to challenge imposed restrictions). To overcome this issue, a homography was used to transform the image into a top-down view. Then a combination of HSV colour segmentation and Hough line detection were used to segment the image. An example homographied image is shown below.
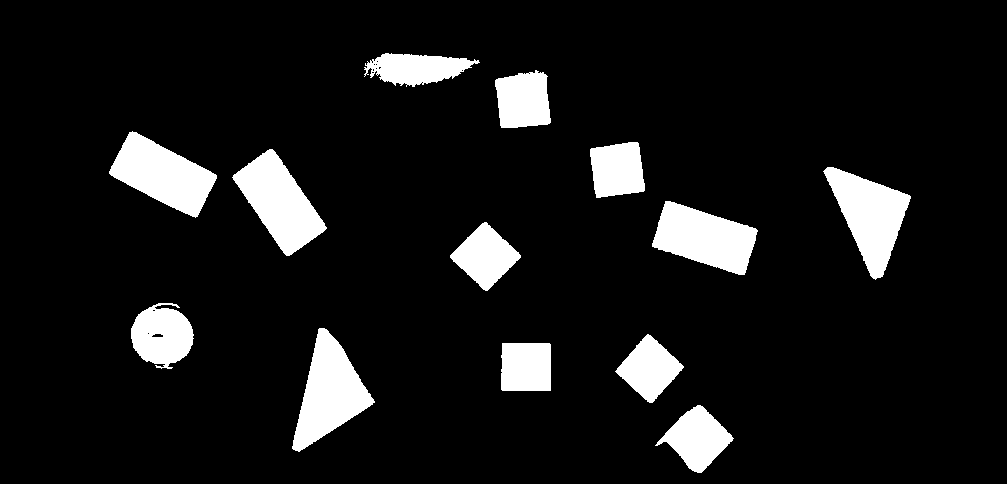
The bolbs in the segmented image were then classified into puck position, goal position and the different block shapes and heights. This allowed the construction of a 2D map of the playing field. The A* algorithm was then used to search for a path between the puck and goal based on a cartesian heuristic. An example 2D binary map is shown below.
Results
The project scored 90% in the demo (+10% grade bonus since we were the only team to demo early). The following is a video of testing phase of the arm. (in the final demo the goal was secured to the playing surface).